uhf rfid positioning This paper presents a phase-based method for UHF-RFID localization of passive tags with measurements gathered along a square antenna trajectory. The tag position is retrieved by considering the phase curve maximum and an operator accounting for its variability. $389.99
0 · UHF RFID Positioning with Square Antenna Trajectory
1 · Robot
2 · Position Tracking for Passive UHF RFID Tags with the Aid of
Simply tap the “Read NFC” button to start scanning for NFC tags and then place the back of your phone to the tag. It’s that simple! No external hardware .
This paper presents a phase-based method for UHF-RFID localization of passive tags with measurements gathered along a square antenna trajectory. The tag position is retrieved by considering the phase curve maximum and an operator accounting for its variability. This article presents the application of the synthetic aperture radar (SAR) localization method for indoor positioning of ultrahigh-frequency (UHF)-radio frequency .
This paper presents a phase-based method for UHF-RFID localization of passive tags with measurements gathered along a square antenna trajectory. The tag position is retrieved by considering the phase curve maximum and an operator accounting for its variability. The most accurate approaches for tracking the tag’s position, deliver precision in the order of 20 cm over a range of a few meters and require moving parts in a predefined pattern (mechanical antenna steering), which limits their application. This article presents the application of the synthetic aperture radar (SAR) localization method for indoor positioning of ultrahigh-frequency (UHF)-radio frequency identification (RFID) tags when the robot-mounted reader .Requirements: large read volumes (entire rooms); decimeter-range accuracies. Images: SSI Schaefer, brighamyen.com. Traditional RFID applications domains – ranging allows for: RFID Gates. distance bounding, range gating reduce false detects.
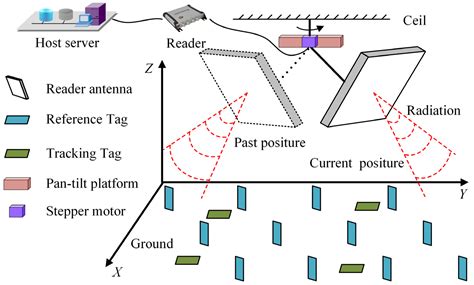
In RFID systems, how to detect the position precisely is an important and challenging research topic. In this paper, we propose a range-free 2D tag localization method based on phased array . For most indoor positioning systems, ultra-high-frequency (UHF) RFID technology is preferred, because the higher frequency allows for a wider read/write spectrum and more metadata of the RFID tag being read, and advanced operations are better supported in the higher-frequency bands.A UHF radio-frequency identification (RFID) indoor positioning system based on phase difference is presented in this paper. An additional auxiliary tag and the target tag make up a double tag array to eliminate the phase ambiguity.
Therefore, indoor positioning using UHF RFID technology could be one solution towards ubiquitous localization, as efforts are made to shrink the size of RFID reader ICs and to integrate them into mobile phones.passive ultra high frequency RFID tag localization has attracted great interest, due to its insensitivity to the propagation envi-ronment and tagged object properties compared with the signal strength based method. In this paper, a phase-based maximum-likelihood tag positioning estimation is proposed. To mitigate In this paper, we give an overview of spatial identification (determining position and velocity) of modulated backscatter UHF RFID tags using RF phase information.
UHF RFID Positioning with Square Antenna Trajectory
This paper presents a phase-based method for UHF-RFID localization of passive tags with measurements gathered along a square antenna trajectory. The tag position is retrieved by considering the phase curve maximum and an operator accounting for its variability. The most accurate approaches for tracking the tag’s position, deliver precision in the order of 20 cm over a range of a few meters and require moving parts in a predefined pattern (mechanical antenna steering), which limits their application.
This article presents the application of the synthetic aperture radar (SAR) localization method for indoor positioning of ultrahigh-frequency (UHF)-radio frequency identification (RFID) tags when the robot-mounted reader .
Requirements: large read volumes (entire rooms); decimeter-range accuracies. Images: SSI Schaefer, brighamyen.com. Traditional RFID applications domains – ranging allows for: RFID Gates. distance bounding, range gating reduce false detects.
In RFID systems, how to detect the position precisely is an important and challenging research topic. In this paper, we propose a range-free 2D tag localization method based on phased array .
For most indoor positioning systems, ultra-high-frequency (UHF) RFID technology is preferred, because the higher frequency allows for a wider read/write spectrum and more metadata of the RFID tag being read, and advanced operations are better supported in the higher-frequency bands.A UHF radio-frequency identification (RFID) indoor positioning system based on phase difference is presented in this paper. An additional auxiliary tag and the target tag make up a double tag array to eliminate the phase ambiguity. Therefore, indoor positioning using UHF RFID technology could be one solution towards ubiquitous localization, as efforts are made to shrink the size of RFID reader ICs and to integrate them into mobile phones.
passive ultra high frequency RFID tag localization has attracted great interest, due to its insensitivity to the propagation envi-ronment and tagged object properties compared with the signal strength based method. In this paper, a phase-based maximum-likelihood tag positioning estimation is proposed. To mitigate
Robot
dell rugged 7214 how to set card routing to rfid
define rfid active type ii read write technology
do chip cards have rfid capability
Position Tracking for Passive UHF RFID Tags with the Aid of
Open the Windows Settings app, select Accounts, select Sign-in options, select .
uhf rfid positioning|Robot